

PID CONTROL กับการใช้งานใน PLC
ในระบบการควบคุมที่ใช้ในอุตสาหกรรมนั้นความแม่นยำในการควบคุมเป็นเรื่องสำคัญเนื่องจากการที่ระบบเกิดความผิดพลาดเพียงน้อยนิดก็อาจส่งผลกระทบเสียหายกับชิ้นงานเป็นจำนวนมากได้
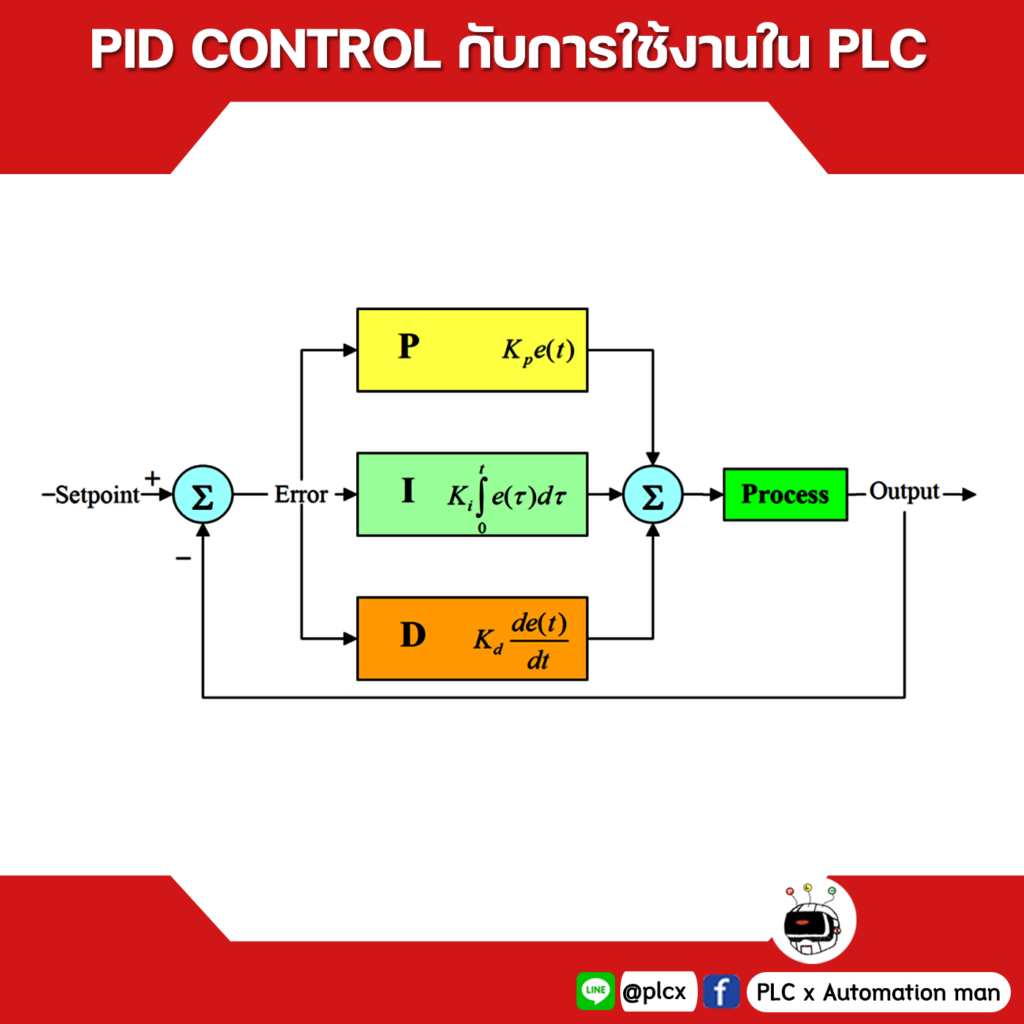
ด้วยเหตุผลนี้เราจึงต้องมีรูปแบบการควบคุมที่เชื่อถือได้ ที่จะนำมาใช้ควบคุมระบบ รูปแบบที่เป็นที่นิยมแพร่หลายรูปแบบหนึ่งนั่นก็คือ การควบคุมด้วย PID Control ย่อมาจาก Proportional-Integral-Derivative เป็นระบบควบคุมแบบ Close loop หรือก็คือการนำเอาค่าเอาต์พุตของระบบกลับมาป้อนกลับ ให้กับตัวควบคุมของระบบเพื่อที่ระบบจะได้รู้ว่าค่าเอาต์พุตตอนนี้นั้นถึงจุดที่เราตั้งไว้หรือยัง ด้วยรูปแบบการควบคุมแบบนี้ทำให้เราสามารถควบคุม ค่าเอาต์พุตที่เราต้องการได้ผ่านระบบ PID นั่นเอง
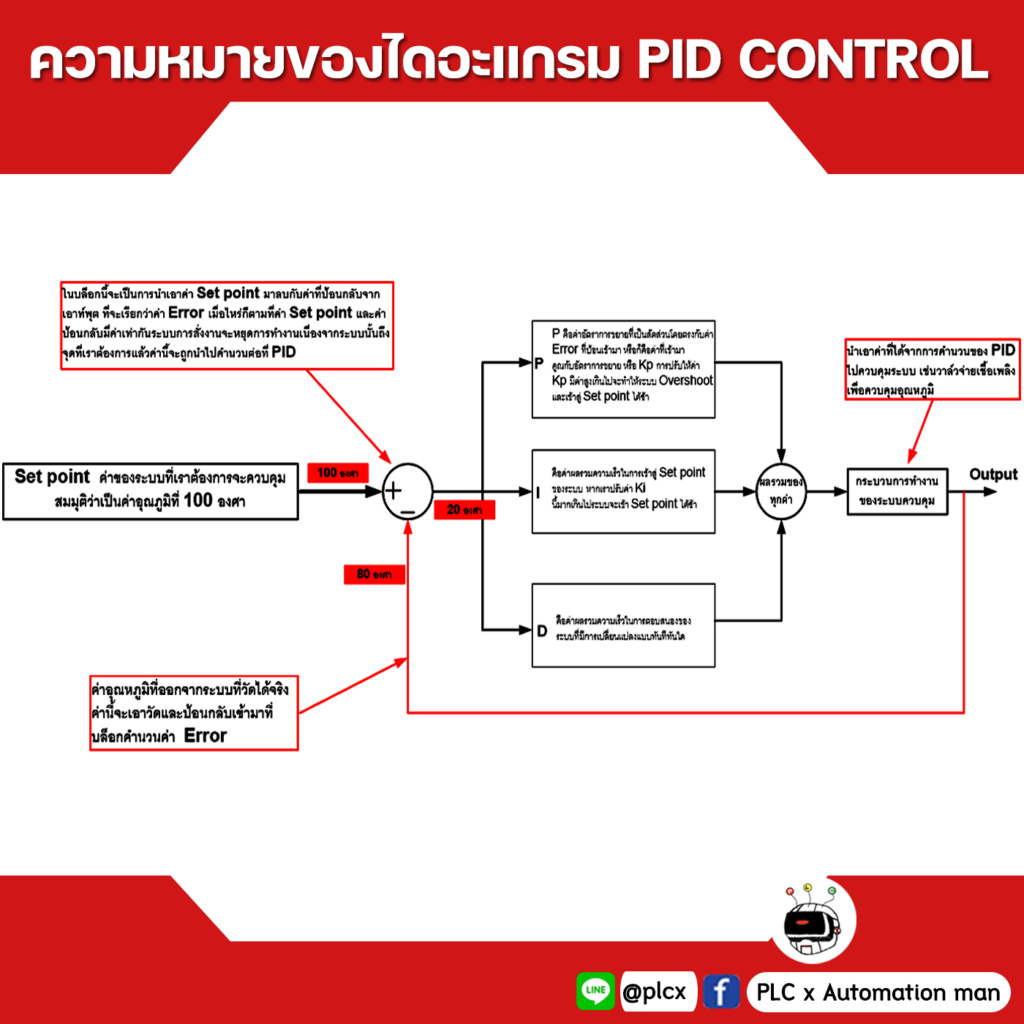
ความหมายของไดอะแกรม PID CONTROL ในการใช้งาน PID นั้น มีรูปแบบการควบคุมที่นิยมใช้อยู่สามรูปแบบคือ การใช้ PI Control,PD Control และ PID Control (การควบคุมจะขาด Pไม่ได้ จะต้องมี P ด้วยเสมอเนื่องจากเป็นตัวควบคุมหลัก) ซึ่งแต่ละแบบก็จะมีข้อดีข้อเสียต่างกัน เช่น PI Control ข้อดีคืออัตราการตอบสนองดีเข้าสู่ Set point ได้ไวเซ็ตค่าง่าย PD Control เหมาะสำหรับระบบที่มีการเปลี่ยนแปลงแบบรวดเร็วฉับพลัน และสุดท้ายที่เป็นการควบคุมที่มีเสถียรภาพมากที่สุดคือ PID Control เนื่องจากจะรวมเอาข้อดีทั้งสองแบบก่อนหน้ารวมเข้าไว้ด้วยกัน แต่ข้อเสียคือ เซ็ตค่าได้ยาก เมื่อต้องการเปลี่ยนแปลงค่าของระบบแต่ละครั้ง
การเขียนโปรแกรม PID CONTROL PLC Mitsubishi
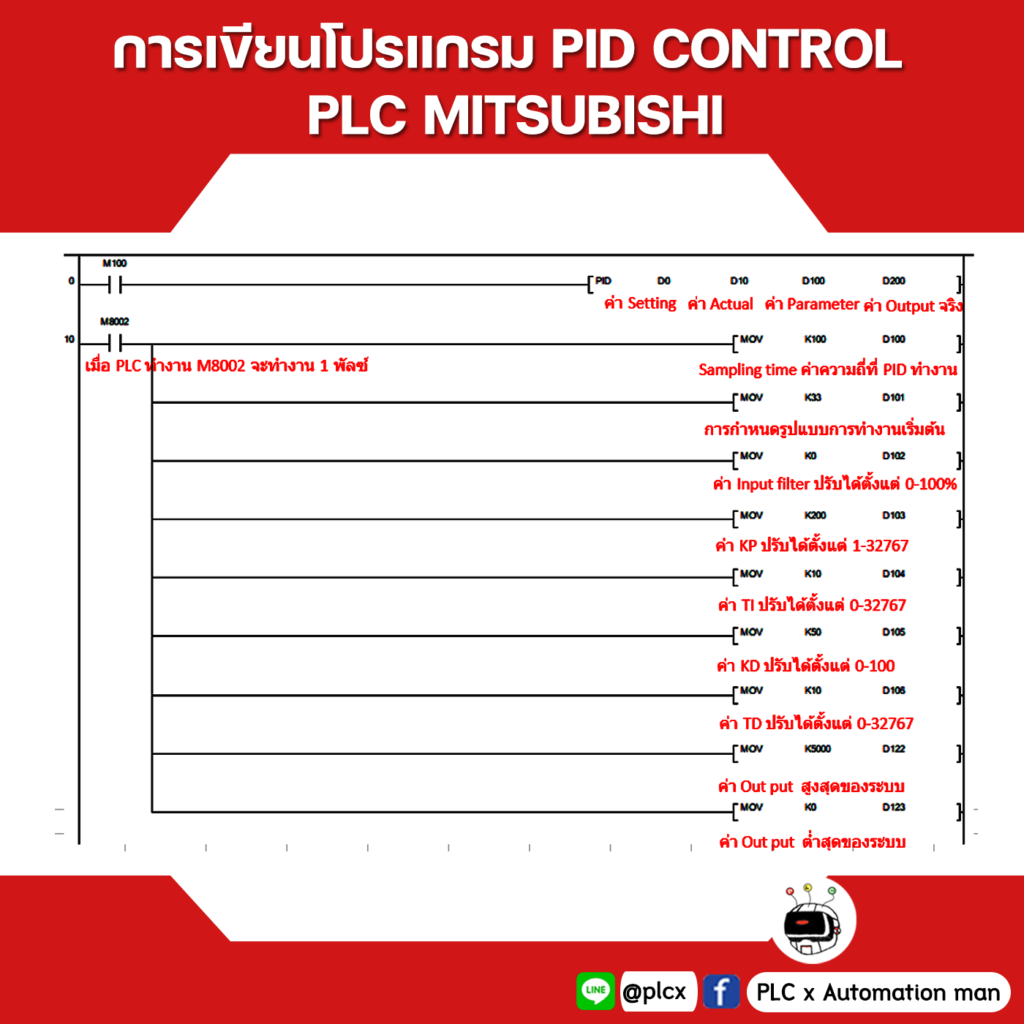
ในการเขียนโปรแกรมเพื่อควบคุมเอาต์พุตที่จะไปควบคุมอุปกรณ์ แบบ PID นั้นเราจะต้องทำความเข้าใจถึงค่าแต่ละค่าที่เราจะเขียนและนำไปใช้เพื่อให้ระบบมีเสถียรภาพสูงสุด
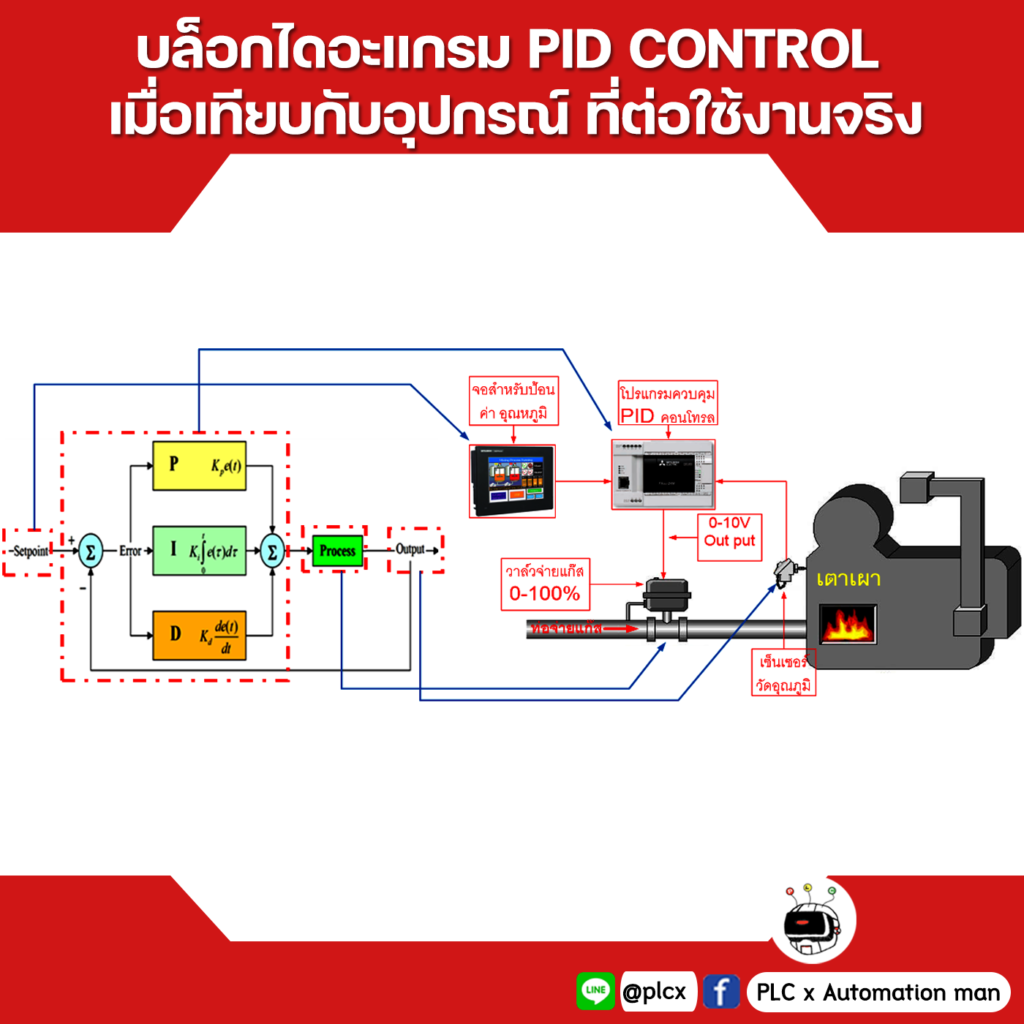
ในรูปที่แสดงนั้นเป็นรูปแบบในส่วนของ การตั้งค่า PID ต่างๆ ซึ่งหากจะนำไปประยุกต์ใช้จริง จะเป็นการเอาเอาต์พุตที่ได้จากระบบนี้ ไปใช้งานต่อนั่นเอง